在商汤科技林达华最新的文章《迈向多模态通用智能:商汤的思考》中,有一段话令人印象深刻:“过去人工智能的每一次跃迁,都是一次数据边界的突破。”
AI从图像识别到语言理解,再到多模态大模型,都是建立在数据能力不断迁移的基础上。林达华更进一步指出,人工智能发展的第四次破壁,是真正突破虚拟与现实之间的边界,让智能系统走出屏幕,进入物理世界,在真实时空中实现感知、理解和行动。
这个判断,为AI的未来催生了新的路径。而有趣的是,这条路径,已经有人在现实中实践。蘑菇车联,构建这样一个能够在物理世界中实现的人工智能网络。
一、从“消耗世界”到“影响世界”
过去几年,我们对人工智能的认知往往停留在“它能看懂什么”“能说话”“能听懂什么”。无论是图像生成模型、语音助手,还是大模型问答系统,它们的智能主要体现在数字空间——屏幕上的一串回答、图像、推荐。
然而,现实世界有更高的智力。真正的智能体,不仅要能“看懂”,还要能“动得准”;不仅要能感知,还要能影响——这是从多模态智能走向物理智能的关键一步。
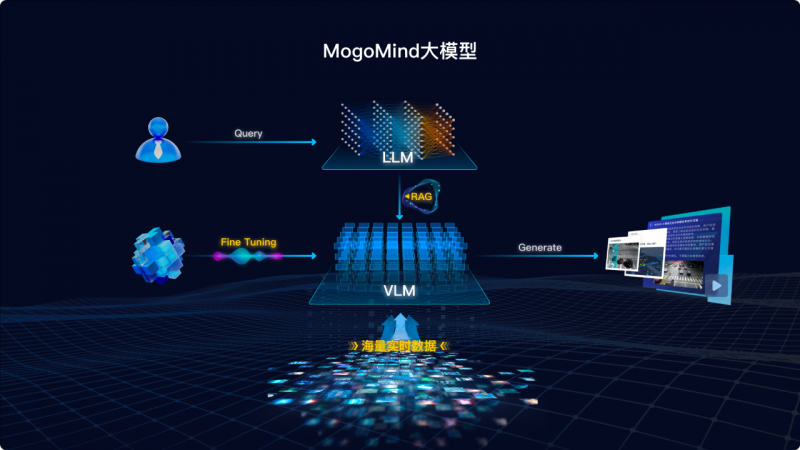
蘑菇车联构建的“AI网络”,本质上就是一次将AI嵌入物理世界的系统性尝试。其核心机制并不复杂:通过部署在城市各处的摄像头、激光雷达、雷视融合感知设备,采集多源交通数据;再交由MogoMind大模型进行实时分析与决策;最终通过网络下发指令,控制无人车、交通信号、甚至城市运力的实时调度。这是一种数字智能与物理空间之间的闭环交互机制,让AI理解世界,能够更实时介入世界的运行。
二、“数字孪生路口”:AI行动的训练场
要理解这个人工智能网络在现实中的长什么样,最好的例子就是“数字孪生路口”。在浙江桐乡,蘑菇车联打造了全国首个实时数字孪生交叉路口。这里的每一辆车、每一个行人、每一次红绿灯变化,都会被感知设备记录并实时映射到数字空间中。

MogoMind模型会在“虚拟世界”中进行推演:哪一路口应该避让?哪个路口要避让?是否存在冲突?——然后将决策信息通过车路和谐网络发回真实车辆与交通设施,“现实—虚拟—现实”的快速循环。
这不是科幻,也不是演示系统,而是一套已经实际运行在城市道路中的人工智能物理系统。从这个角度来看,蘑菇车联并非在做某种垂类的技术方案(如自动驾驶或红绿灯优化),而是在建立一个能承载装置体智能体交互的城市AI操作系统。在这个系统中,AI直接对城市物理空间产生影响。
三、不仅仅是“自动驾驶”,而是“AI的物理网络”
如果非要给蘑菇车联一个比较准确的定义,它不是自动驾驶公司,也不是大型模型公司,而是在构建一个可落地物理AI网络的人工智能公司。
这张网络服务的不仅仅是“无人车”——它服务未来需要所有在物理空间中运行的智能体:自动物流机器人、城市环卫系统、智能公交调度系统、甚至未来的智能机器狗、机器臂。这张网络般现实世界的“神经系统”,让AI能够获得“感知硬件”、“大脑”(MogoMind)、“脊椎”(AI网络)、“四肢”(自动执行系统),完成从“世界”到“介入”的跨越迁移。
而这种跃迁,正是林达华所说的“AGI通往现实世界的关键一跃”。我们常说AI是“世界模型”,但更进一步,它还需要一个“世界执行器”。蘑菇车联做的就是让AI不再只是一个聪明的观察者,而成为一个高效、实时的行动者。
当我们讨论AI的未来时,往往集中在参数规模、推理能力、算法突破,但其实,还有一件更基础、更重要、也更难的事情:如何让AI拥有现实世界的执行通道。
蘑菇车联提供了一条值得参考的路径:不是让每个模型都“懂城市”,而是构建一个城市级的AI网络,让模型有开采、有良好、有执行的基础设施,像互联网一样成为智能体的运行平台。AI的第四次破壁,不会在显卡中完成,而是在一个真实的城市路口完成。